
Схема управления трехфазным асинхронным двигателем
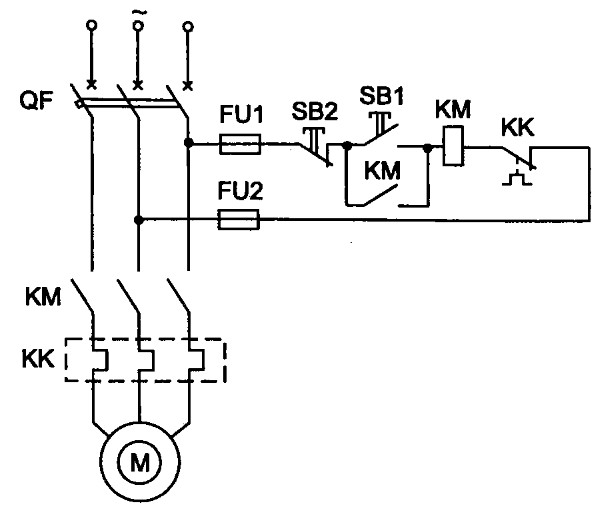 Рисунок 1 — Простейшая схема асинхронного двигателя
Рисунок 1 — Простейшая схема асинхронного двигателя
Для подачи напряжения на управляющую и силовую цепь используется автоматический выключатель QF. Пуск асинхронного двигателя осуществляется кнопкой SB1 «Пуск”, которая замыкает свои контакты в цепи катушки магнитного пускателя КМ. Который срабатывая замыкает основные контакты силовой цепи статора. Вследствие чего электродвигатель М подсоединяется к питанию. В то же время в управляющей сети происходит замыкание блокирующего контакта КМ который шунтирует кнопку SB1.
Чтобы отключить асинхронный двигатель с кз ротором, необходимо нажать клавишу SB2 «Стоп». При этом питающая сеть контактора КМ размыкается и подача напряжения на статор прекращается. После этого нужно выключают автомат QF.
Схема управления АД с кз предусматривает несколько защит:
- от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU;
- от перегрузок — посредством теплореле КК (при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка);
- нулевая защита — посредством магнитного пускателя КМ (при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается).
Для подключения электродвигателя после срабатывания защитного механизма требуется снова надавить клавишу SB1.
Схемы управления электроприводами
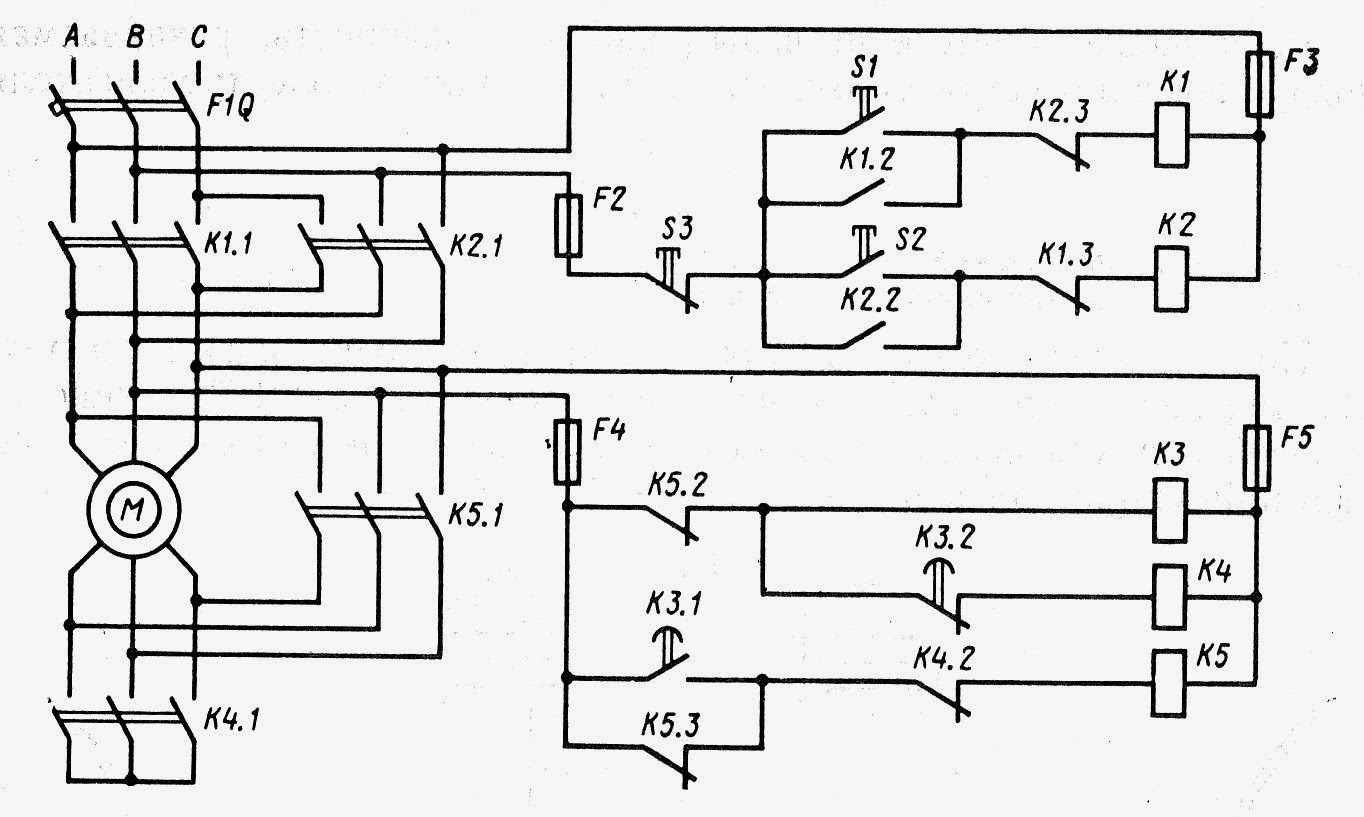
Схема пуска асинхронного двигателя с фазным ротором с помощью магнитной станции П При включённом трёхполюсном, выключателе Q1, выполненном в виде рубильника, нажатие пусковой кнопки S2 приводит к присоединению катушки линейного контактора K1 к источнику питания и включению главными замыкающими контактами K1. Схема обеспечивает прямой пуск и реверс двигателя, а также торможение противовключением при ручном неавтоматическом управлении.
При снижении температуры до установленной ДОТ размыкается и компрессор выключается. Схема последовательного включения двигателей Пример 5.

Реостатный пуск асинхронного двигателя с кз ротором.
Точка П является точкой трогания. Один асинхронный низковольтный электродвигатель, предназначенный для привода компрессора.
Защита двигателя при реверсивном управлении такая же, как и при нереверсивном. При реверсировании двигателя на ходу вначале происходит торможение от данной скорости до нулевой, а затем разгон в другом направлении.

В случае необходимости только торможения двигателя при достижении им нулевой частоты вращения должна быть вновь нажата кнопка SВЗ, что приведет к отключению двигателя от сети и возвращению схемы в исходное положение. Средства для ингаляционного наркоза : Наркоз наступает в результате вдыхания ингаляции средств, которое осуществляют или с помощью маски

Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. Частоту вращения асинхронного двигателя можно регулировать изменением частоты тока питающей сети, числа пар полюсов статорной обмотки, введением в цепь ротора сопротивления, вызывающего увеличение скольжения.
Схемы управления магнитным пускателем

Модуль управления электроприводом на микроконтроллере PIC16C62 и драйвере IR2131
Для некоторых, относительно простых задач управления электроприводом можно использовать неспециализированные микроконтроллеры, к которым разработчик привык и которые свободно продаются на нашем рынке. В [1] были показаны основные требования к микроконтроллерам и описан круг современных задач, где применение специализированных микросхем является наиболее разумным решением. В этой статье мы показываем возможность использования микроконтроллера PIC16C62 фирмы Microchip для решения простых задач управления приводом, которые часто встречаются в быту. В основном, предлагаемая схема предназначена для управления трехфазными асинхронными двигателями, когда в распоряжении имеется однофазная сеть 220 В. Схема, изображённая на рис. 1, состоит из силового трехфазного инвертора, генератора управляющих сигналов и сопрягающего элемента — драйвера для ключей инвертора. Рассмотрим эти элементы и опишем некоторые алгоритмы, которые можно реализовать на них.
Рис. 1. Схема управления асинхронным двигателем
Привлекательная во всех отношениях микросхема IR2131 (или IR2130) фирмы INTERNATIONAL RECTIFIER уже не новость, но редко встречается в отечественных разработках. Одной из причин этого является её относительно высокая стоимость, но если принять во внимание, что цена таких изделий на нашем рынке сильно зависит от спроса, то с определённым риском можно рекомендовать её разработчику для применения в изделиях, где определяющим фактором является цена.
Микросхема IR2131 представляет собой драйвер 6-ти ключей (IGBT или MOSFET), имеющий три выхода для управления нижними ключами моста и три выхода для ключей с плавающим потенциалом управления. В ней предусмотрена защита по току, которая выключает все ключи и выдает сигнал ошибки FAULT, когда сигнал на выводе ITRIP превышает 0,5 В. Это удобно для разработчика, поскольку организация такой защиты требует от него лишь правильного определения величины резистора датчика. Входы драйвера согласуются с ТТЛ логикой, что позволяет управлять им с помощью микроконтроллеров с 5-В питанием без дополнительных преобразователей уровня. Кроме этого, у IR2131 есть отдельный вход выключения всех ключей и вход сброса сигнала ошибки, а у IR2130 вместо них имеется встроенный усилитель тока нагрузки, и сброс триггера ошибки осуществляется при подаче на все входы управления неактивного уровня. Допустимое напряжение на инверторе, с которым работает микросхема, составляет 600 В. В настоящее время фирмой INTERNATIONAL RECTIFIER производятся аналогичные драйверы с рабочим напряжением 1200 В.
На рис. 1 изображена простейшая схема трехфазного моста на транзисторах IRF740, которые управляются от IR2131. Для генерации сигналов управления мостом можно использовать недорогой микроконтроллер фирмы Microchip PIC16C62 (если необходимо дополнительно обрабатывать аналоговый сигнал, то рекомендуется PIC16C73).
При небольшой номинальной мощности электропривод питается от сети переменного тока 220 В через разъём Х1, при этом рекомендуется использовать в трехфазном мосте транзисторы IRF740 (VT2–VT7). Через них можно пропустить мощность до 5 КВт. При больших мощностях надо переходить на питание от трёхфазной сети 380 В и использовать IGBT транзисторы. Наш опыт работы показал целесообразность шунтирования затворных резисторов R13–R18 обратными диодами VD7–VD12. Это позволяет значительно снизить динамиче-ские потери при выключении. Сформированное напряжение подаётся на двигатель через разъём Х2.
Если ёмкость фильтра С12 велика и нет элемента, ограничивающего ток заряда этой ёмкости, то при каждом включении будут постепенно разрушаться диоды моста. Для предотвращения броска тока через выпрямитель необходимо включение терморезистора R19. При работе от однофазной сети 220 В может возникнуть необходимость введения модуля коррекции потребляемого тока (это особенно актуально при больших мощностях привода). Для некоторых разработок, где 100-Гц пульсации момента на валу двигателя не приводят к нежелательным последствиям, можно вообще отказаться от использования конденсатора С12.
Конденсатор С11 (керамический или полипропиленовый) необходимо располагать максимально ближе к транзисторам моста, поскольку полевые и IGBT транзисторы “не любят” перенапряжений, которые будут возникать при коммутациях на паразитных индуктивностях схемы. Питание на драйвер DD2 подается от стабилитрона VD2 через гасящий резистор R12. При небольших частотах инвертора (до 3 кГц) достаточно 40 кОм для нормального питания системы управления. Для увеличения КПД системы можно применить стандартный импульсный понижающий регулятор, используя в качестве ШИМ-контроллера ресурсы PIC16C73. Бутстреповые ёмкости С7–С9 заряжаются через диоды VD4–VD6 при включении соответствующего нижнего ключа. Напряжение питания IR2131 выбирается в зависимости от желаемой степени насыщения силового транзистора. Рекомендуемая величина — 15–20 В. Уменьшение питающего напряжения какого-нибудь из каналов ниже 8 В вызывает немедленное запирание ключа. Величина резистивного датчика тока R10 выбирается в зависимости от номинальной мощности электропривода и допустимой перегрузки по току (R10 = 0,5 В / Iдоп). Интегрирующее звено R11-C10 предотвращает ложное срабатывание токовой защиты в моменты коммутаций, достаточная величина постоянной времени — 0,5 мкс. При превышении сигналом на входе ITRIP уровня 0,5 В все ключи запираются и выдаётся сигнал ошибки FAULT (выход с открытым коллектором).
Рис. 2. Осциллограммы тока и напряжения при 180° коммутации
Обработкой сигнала ошибки и общим управлением занимается микроконтроллер DD1. На это место удачно подходят PIC микроконтроллеры фирмы Microchip. Это RISC контроллеры с гарвардской архитектурой, они просты в изучении и имеют значительные преимущества перед другими контроллерами в подобных схемах. Диапазон рабочих напряжений питания PIC процессоров — 4–6 В, максимальный потребляемый ток при тактировании от RC генератора — 5 мА, ток в режиме пониженного энергопотребления — 20 мкА. Большое удобство создает повышенная нагрузочная способность портов — 25 мА, что позволяет напрямую управлять светодиодами (включая светодиоды оптронов). Наличие разнообразной периферии (АЦП, компараторы, последовательные порты, таймеры, модуль ШИМ и пр.) предоставляет разработчику широкие возможности для построения гибких и дешёвых систем управления. Все микроконтроллеры PIC16/17 имеют встроенную схему сброса, сторожевой таймер и защиту кода от считывания. Microchip свободно распространяет ассемблер MPASM, симулятор MPSIM и интегрированную систему отладки для Windows MPLAB. Имеющиеся для этих контроллеров Си-компиляторы (например, компилятор фирмы HI-TECH) ускоряют процесс написания и отладки программ. В нашей схеме процессор PIC16C62 питается от стабилитрона VD3. При несложных задачах управления электроприводом можно тактировать микроконтроллер от RC генератора (R6-C1). Максимально допустимая частота при этом — 4 МГц. Поскольку почти все команды выполняются процессором за один такт (в данном случае за 1 мкс), то этого оказывается достаточно даже для выдачи на двигатель синусоидально-центрированной ШИМ с частотой несущей 3 кГц.
Наиболее просто организуется управление со 180о (или 120о) коммутацией. Использование ресурсов микроконтроллера для этой задачи приводится в таблице. Осциллограммы тока и напряжения в этом режиме показаны на рис. 2.
С помощью переключателей J1–J4 осуществляются следующие функции управления:
- пуск–остановка двигателя (можно дистанционно через оптрон VT1);
- выбор скорости вращения двигателя;
- изменение направления вращения двигателя.
Кроме того, легко осуществить пуск двигателя с требуемой кратностью пускового момента, по срабатыванию токовой защиты, вырабатывая перед сигналом сброса ошибки нулевую паузу.
Для демонстрации возможностей системы покажем реализацию широтно-импульсной модуляции базовых векторов. Основываясь на базовых векторах 180о коммутации (рис. 3), формируется синусоидально-центрированная ШИМ.
Рис. 3. Базовые вектора 6-тактной коммутации
Программой осуществляется переключение между двумя соседними векторами таким образом, что результирующий вектор плавно движется по траектории шестиугольника. Вырабатывая определённые длительности для каждого вектора, получаем напряжение, близкое к синусоидальному. Если ввести нулевой вектор, то можно заставить результирующий вектор напряжения двигаться по любой окружности внутри базового шестиугольника.
Для случая, когда на двигателе формируется синусоидальное напряжение 100 Гц с частотой ШИМ 3 кГц, осциллограммы имеют вид, как показано на рис. 4.
Рис. 4. Осциллограммы тока и напряжения при синусоидальной ШИМ
Для некоторых двигателей такая форма тока может оказаться неприемлемой из-за высокочастотных пульсаций потока, что приводит к увеличению потерь в стали и в демпферных системах двигателя. В этом случае нужно увеличивать частоту тактирования процессора и переходить на более высокие частоты ШИМ.
В таблице приведены данные по использованию некоторых ресурсов микроконтроллера PIC16C62 для случая выдачи синусоидально-центрированной ШИМ с модуляцией базовых векторов.
Таблица
| Ресурсы контрол лера |
Память данных, байт | Память программ, слов | Линии ввода/ вывода |
Тай меры |
Источ ники преры вания |
Число тактов программы за 1/6 периода вращения двигателя |
| Предоставляемые | 128 | 2к | 22 | 3 | 7 | |
| Использованные для: | ||||||
| 180° управления | 12 | 180 | 12 | 1 | 1 | 10 |
| синусоидальной ШИМ | 48 | 554 | 12 | 1 | 1 | 150 |
| бездатчиковой схемы | 44 | 754 | 20 | 2 | 3 | 30 |
| управления ВД | реализуется на микроконтроллере PIC16C73 с дополнительной обвязкой | |||||
Если использовать датчик положения ротора, и завести его сигналы на свободные выводы микроконтроллера, то с помощью этой системы можно управлять вентильным двигателем или синхронным реактивным двигателем. Следует особо отметить возможность построения бездатчиковой схемы управления вентильным электродвигателем с постоянными магнитами (такая разработка нами сделана и имеет большие преимущества перед аналогами). При этом в исходную схему необходимо добавить регулятор напряжения, подаваемого на инвертор, компаратор и некоторую обвязку из пассивных компонентов. Определением угла положения ротора занимается процессор PIC16C73. В бездатчиковой схеме с тактированием PIC16C73 от RC генератора можно управлять вентильным двигателем с частотой вращения до 100 Гц. Для выхода на большие скорости вращения нужно увеличивать частоту тактирования процессора. Бездатчиковая схема усложняется для вентильных двигателей с большой индуктивностью, если коммутационные интервалы превышают 30о.
В [6] предлагался вариант бездатчикового привода для бесколлекторного двигателя постоянного тока на базе MC68HC908MR24. В качестве недостатков предложенного механизма определения угла положения ротора следует отнести невозможность работы схемы с высокоиндуктивными двигателями (длительный коммутационный интервал не отфильтруется, и компараторы “поймают” ложный переход противо-ЭДС через ноль), второй существенный недостаток — это проблема пуска двигателя. В предложенной схеме потребуются значительные вычислительные ресурсы для определения первоначального положения ротора, особенно если учесть, что нормальный пуск двигателя происходит на низкой частоте при выполнении определенного соотношения U/f. Для сравнения, в таблице приводятся данные по использованию ресурсов PIC16C73 в бездатчиковой схеме управления вентильным двигателем с постоянными магнитами, когда коммутационные интервалы не превышают 30о.
Рис. 5. Внешний вид платы управления
Внешний вид изделия, собранного по предложенной схеме, показан на рис. 5. Габаритные размеры 135ґ80ґ33 мм.
В заключение отметим перспективность построения микропроцессорных систем управления электроприводом, даже в случае, когда определяющим фактором при разработке является цена. Стоимость микроконтроллеров уменьшается, а возможности, которые они предо-ставляют, делают систему гибкой и легко модернизируемой без изменения электрической схемы. Применение специализированных микросхем, как было показано на примере драйвера IR2131, избавляет разработчика от лишних затрат на проектирование, а изготовителя — от лишних затрат на сборку и настройку. Данная схема имеет высокую надёжность из-за минимального количества электронных компонентов. В результате симбиоза этих двух микросхем получается недорогой электропривод с удобным и качественным управлением.
Литература
- В. Козаченко. Основные тенденции развития встроенных систем управления двигателями и требования к контроллерам // CHIIP NEWS. — 1999. — № 1. — С. 2–9.
- Control Integrated Circuit Designers“ Manual. International Rectifier, 1996.
- Power Semiconductors. Product Digest 47th Edition, 1995.
- PIC16/17 MICROCONTROLLER DATA BOOK, 1997.
- Однокристальные микроконтроллеры Microchip: PIC16C8X. Пер. с англ./Под ред. Владимирова А.Н. — Рига.: ORMIX. — 1996. — 120 с.
- Radim Visinka, Leos Chalupa, Ivan Skalka. Системы управления электродвигателями на микроконтроллерах фирмы MOTOROLA // CHIIP NEWS. — 1999. — № 1. — С. 14–16.
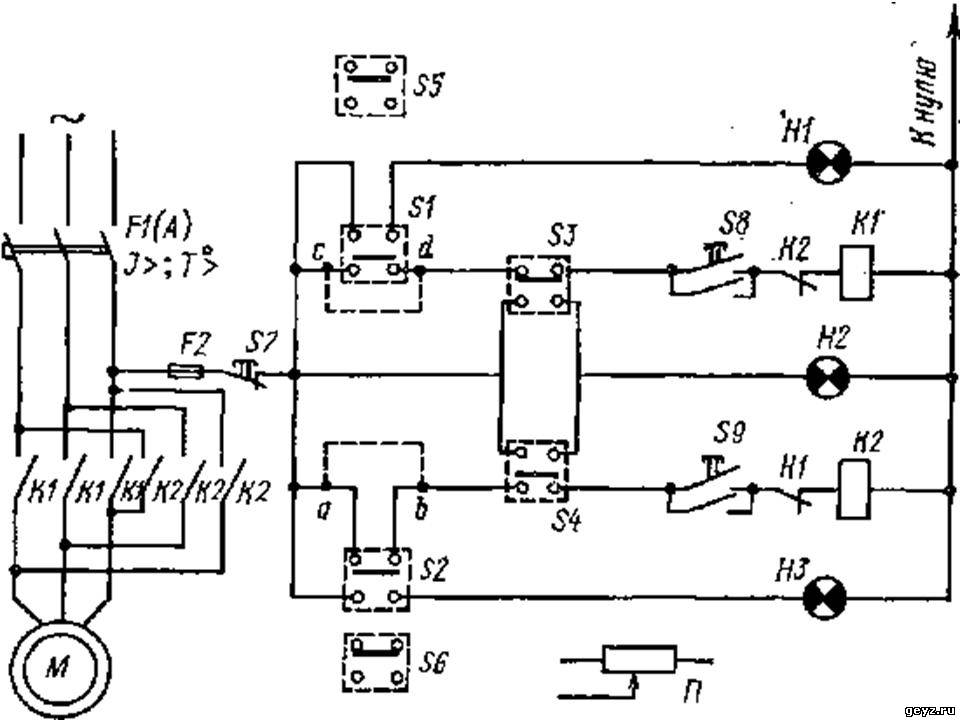
Схема реверса асинхронного двигателя

В основе этого способа лежит изменение фазировки питающего напряжения двигателя, питающего обмотки статора. Схема реверса двигателя, в отличие от обычной схемы управления (пуск и останов) содержит не один, а два магнитных пускателя.
Как видно из схемы, их силовые контакты скоммутированы таким образом, что сработка каждого магнитного пускателя обеспечит подачу питающего напряжения на двигатель разной фазировки.
Порядок чередования питающих электродвигатель фаз при сработке пускателя КМ1 будет следующим: L1, L2, L3, а при сработке КМ2: L3, L2, L1. Изменение питающих фаз L1 на L3 и наоборот обеспечит разные направления вращения электромотора.
Для пуска электродвигателя в разных направлениях в схеме имеются две пусковые кнопки, нажатие на каждую вызовет сработку определенного контатора. В зависимости от того, какой именно пускатель сработал, фазировка питания на зажимах двигателя будет L1, L2, L3 или L3, L2, L1.
Для остановки электромотора в цепи питания катушек обоих пускателей предусмотрена одна кнопка “Стоп”, нажатие на которую прервет питающую цепь катушки сработавшего пускателя.
Во избежание одновременной сработки обоих пускателей вследствие ошибочных нажатий на “стартовые” кнопки и предотвращения замыкания фазного проводника L1 на L3 в управляющей части предложенной схеме на основе релейной логики выполнена блокировка такой сработки.
При сработке одного из магнитных пускателей, цепь питания катушки другого окажется размокнутой нормально-замкнутым контактом сработавшего контактора, включенным последовательно в эту цепь.
- Главная
- Электрические схемы
- Реверс асинхронного двигателя
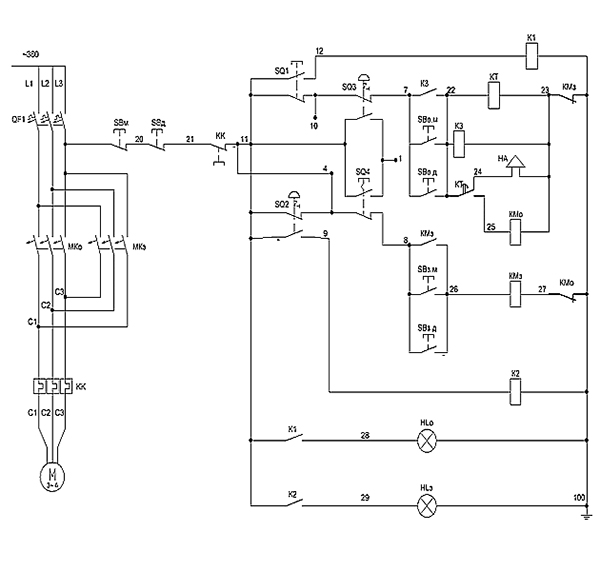
Комплект учебно-лабораторного оборудования «Схемы управления двухскоростным асинхронным двигателем с короткозамкнутым ротором»

Техническое описание
Габариты: не более 650 х 600 х 450 мм.
Масса: не более 25 кг.
Электропитание: 3 х 380 В, 50 Гц.
Потребляемая мощность от сети: не более 750 Вт.
Класс защиты от поражения электрическим током: I.
Комплектность
Состав:
- Шкаф электромонтажный с замком.
- Контакторы с контактными приставками – 4 шт.
- Электротепловое реле – 2 шт.
- Токовое реле – 2 шт.
- Световой индикатор фаз.
- Универсальный блок защиты.
- Световые индикаторы – 3 шт.
- Кнопки управления – 8 шт.
- Переключатель.
- Амперметр.
- Вольтметр.
- Блок ввода неисправностей.
- Двухскоростной асинхронный двигатель с короткозамкнутым ротором.
- Комплект учебно-лабораторного оборудования «Схемы управления двухскоростным асинхронным двигателем с короткозамкнутым ротором».
- Интерактивная светодинамическая сенсорная панель.
- Паспорт.
- Руководство по эксплуатации.
- Методические рекомендации по выполнению лабораторных работ.
Лабораторные работы
- Сборка и наладка схемы пуска и торможения.
- Сборка и наладка схемы пуска, реверса и торможения.
- Сборка и наладка схемы тепловой защиты с использованием электротеплового реле.
- Программирование микропроцессорного блока управления и защиты.
- Сборка и наладка схемы тепловой защиты с использованием микропроцессорного блока управления.
- Сборка и наладка схемы защиты от обрыва фазы с использованием микропроцессорного блока управления.
- Сборка и наладка схемы «треугольник – двойная звезда» пуска и торможения.
- Сборка и наладка схемы «треугольник – двойная звезда» пуска, реверса и торможения.
- Сборка и наладка схемы пуска и торможения с помощью пакетного переключателя.
- Поиск неисправностей в системе управления электродвигателем.
Описание:
Комплект учебно-лабораторного оборудования представляет собой шкаф с установленными в него элементами управления, защиты и индикации.
Блок ввода неисправностей позволяет вводить 6 неисправностей:
обрыв фазы U,
межфазное замыкание U и W,
обрыв фазы V,
межвитковое замыкание в обмотке V- V1,
обрыв фазы W,
замыкание фазы W на землю.
Компания ООО «Профкабинет» готова предложить своим клиентам, произвести и поставить учебные Электротехника. Электроника. Электромеханика. Электрооборудование для ВПО, СПО, НПО.
Мы предлагаем Вашему вниманию стенд, стоимость комплекта 139200 руб. Стоимость указана актуальная и действует на 1 квартал 2021 года.
Мы готовы как к осуществлению поставки оборудования, так и к полному формированию проекта, подготовке всей необходимой документации и укомплектованию лабораторию «под ключ». Наша компания на практике подтверждает свою мобильность и надежность. Качество учебных и лабораторных стендов находится на высоком уровне, вся продукция проходит ОТК. Оборудование производится в нужные для Вас сроки и по доступной цене.
Нашими клиентами уже стали сотни университетов, техникумов, колледжей и училищ по всей России и странам ближнего зарубежья. Надеемся на плодотворное сотрудничество!
Управление асинхронным двигателем
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Нереверсивная схема

Нереверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитный пускатель
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, SB1 — кнопка остановки, SB2 — кнопка пуска, KM1 — магнитный пускатель, KK1 — тепловое реле, HL1 — сигнальная лампа, M — трехфазный асинхронный двигатель
Реверсивная схема

Реверсивная схема подключения трехфазного асинхронного электродвигателя к трехфазной сети переменного электрического тока через магнитные пускатели
L1, L2, L3 — контакты для подключения к сети трехфазного переменного тока, QF1 — автоматический выключатель, KM1, KM2 — магнитные пускатели, KK1 — тепловое реле, Mм — трехфазный асинхронный двигатель, SB1 — кнопка остановки, SB2 — кнопка пуска «вперед», SB3 — кнопка пуска «назад» (реверс), HL1, HL2 — сигнальные лампы
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.

Функциональная схема частотно-регулируемого привода
-
В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).

Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.

Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
-
По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).

Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Подключение асинхронного электродвигателя
Электродвигатель асинхронный трехфазный и схема подключения зависят от ваших потребностей. Наиболее распространенным вариантом является схема прямого включения, для двигателей, подключенных схемой «треугольника», возможна схема включения на «звезде» с переходом на «треугольник», при необходимости возможен вариант реверсивного включения.
В нашей статье мы рассмотрим наиболее популярные схемы прямого включения и прямого включения с возможностью реверса.
Схема прямого включения асинхронного электродвигателя
В предыдущих главах мы подключили обмотки двигателя, и вот теперь пришло время включения его в сеть. Двигатели должны включаться в сеть при помощи магнитного пускателя, который обеспечивает надежное и одновременное включение всех трех фаз электродвигателя.
Пускатель в свою очередь управляется кнопочным постом – те самые кнопки «Пуск» и «Стоп» в одном корпусе.




Обратите внимание! Вместо автомата вполне возможно применение предохранителей. Только их номинальный ток должен соответствовать номинальному току двигателя. А также должен учитывать пусковой ток, который у разных типов двигателей колеблется от 6 до 10 крат от номинального.
- Теперь приступаем непосредственно к подключению. Его условно можно разделить на два этапа. Первый это подключение силовой части, и второй — подключение вторичных цепей. Силовые цепи – это цепи, которые обеспечивают связь двигателя с источником электрической энергии. Вторичные цепи необходимы для удобства управления двигателем.
- Для подключения силовых цепей нам достаточно подключить вывода двигателя с первыми выводами пускателя, выводы пускателя с выводами автоматического выключателя, а сам автомат с источником электрической энергии.
Обратите внимание! Подключение фазных выводов к контактам пускателя и автомата не имеют значения. Если после первого пуска мы определим, что вращение неправильное, мы сможем легко его изменить. Цепь заземления двигателя подключается помимо всех коммутационных аппаратов.

Теперь рассмотрим более сложную схему вторичных цепей. Для этого нам, прежде всего, как на видео, следует определиться с номинальными параметрами катушки пускателя. Она может быть на напряжение 220В или 380В.
- Так же следует разобраться с таким элементом, как блок-контакты пускателя. Данный элемент имеется практически на всех типах пускателей, а в некоторых случаях он может приобретаться отдельно с последующим монтажом на корпус пускателя.

- Эти блок-контакты содержат набор контактов – нормально закрытых и нормально открытых. Сразу предупредим – не пугайтесь в этом нет нечего сложного. Нормально закрытым называется контакт, который при отключенном положении пускателя – замкнут. Соответственно нормально открытый контакт в этот момент разомкнут.
- При включении пускателя нормально закрытые контакты размыкаются, а нормально открытые контакты замыкаются. Если мы говорим за электродвигатель трехфазный асинхронный и подключение его к электрической сети, то нам необходим нормально открытый контакт.

- Такие контакты есть и на кнопочном посту. Кнопка «Стоп» имеет нормально закрытый контакт, а кнопка «Пуск» нормально открытый. Сначала подключаем кнопку «Стоп».
- Для этого соединяем один провод с контактами пускателя между автоматическим выключателем и пускателем. Его подключаем к одному из контактов кнопки «Стоп». От второго контакта кнопки должно отходить сразу два провода. Один идет к контакту кнопки «Пуск», второй к блок-контактам пускателя.

- От кнопки «Пуск» прокладываем провод к катушке пускателя, туда же подключаем провод от блок-контактов пускателя. Второй конец катушки пускателя подключаем либо ко второму фазному проводу на силовых контактах пускателя, при использовании катушки на 380В, либо он подключается к нулевому проводу, при использовании катушки на 220В.
- Все, наша схема прямого включения асинхронного двигателя готова к использованию. После первого включения проверяем направление вращения двигателя и если вращение неправильное, то просто меняем местами два силовых провода на выводах пускателя.
Схема реверсивного включения электродвигателя
Распространенным вариантом подключения асинхронного электродвигателя является вариант с использованием реверса. Такой режим может потребоваться в случаях, когда необходимо изменять направление вращения двигателя в процессе эксплуатации.
- Для создания такой схемы нам потребуются два пускателя из-за чего цена такого подключения несколько возрастает. Один будет включать двигатель в работу в одну сторону, а второй в другую. Тут очень важным моментом является недопустимость одновременного включения обоих пускателей. Поэтому нам необходимо во вторичной схеме предусмотреть блокировку от таких включений.
- Но сначала давайте подключим силовую часть. Для этого, как и приведенном выше варианте, подключаем от автомата пускатель, а от пускателя — двигатель.
- Единственным отличием будет подключение еще одного пускателя. Его подключаем к вводам первого пускателя. При этом важным моментом будет поменять местами две фазы, как на фото.

- Вывода второго пускателя просто подключаем к выводам первого. Причем здесь уже ничего не меняем местами.
- Ну, а теперь, переходим к подключению вторичной схемы. Начинается все опять с кнопки «Стоп». Ее подключаем к одному из приходящих контактов пускателя – неважно первого или второго. От кнопки «Стоп» у нас вновь идут два провода. Но теперь один к контакту 1 кнопки «Вперед», а второй к контакту 1 кнопки «Назад».

- Дальнейшее подключение приводим по кнопке «Вперед» — по кнопке «Назад» оно идентично. К контакту 1 кнопки «Вперед» подключаем контакт нормально открытого контакта блок-контактов пускателя. Каламбур, но точнее не скажешь. К контакту 2 кнопки «Вперед» подключаем провод от второго контакта блок-контактов пускателя.
- Туда же подключаем провод, который пойдет к нормально закрытому контакту блок-контактов пускателя номер два. А уже от этого блок-контакта он подключается к катушке пускателя номер 1. Второй конец катушки подключается к фазному или нулевому проводу в зависимости от класса напряжения.
- Подключение катушки второго пускателя производится идентично, только ее мы подводим к блок-контактам первого пускателя. Именно это обеспечивает блокировку от включения одного пускателя, при подтянутом положении второго.

